
概要
今回は、dsPIC33AKシリーズのDSPを活用して、LMSアルゴリズムの検証を行います。
LMS(Least Mean Square)アルゴリズムとは、最小2乗誤差を利用した適応フィルターです。目的の信号と実信号の差が最小になるように、係数を適応させるように動作します。アナログ回路では(実現する事は可能だが)現実的でない処理です。
なお今回の記事も以下の書籍(絶版)を参考にしております。

関連記事
| 関連記事 | リンク |
| DSPライブラリの使い方1(デジタルフィルタ) | DSPライブラリの使い方1(デジタルフィルタ) – ぴくおの電子工作的な何かWP (electricpico.com) |
| DSPライブラリの使い方2(FFT) | DSPライブラリの使い方2(FFT) – ぴくおの電子工作的な何かWP (electricpico.com) |
開発環境
開発環境を以下に示します。
今回はCPUボード(EV02G02A)で動作確認を行います。
| 項目 | 値 | リンク |
| ベースボード | dsPIC33A CURIOSITY PLATFORM DEVELOPMENT BOARD | dsPIC33A Curiosity Platform Development Board User’s Guide (microchip.com) |
| CPUボード(EV68M17A) | EV68M17A – dsPIC33AK128MC106 Motor Control DIM | dsPIC33AK128MC106 Motor Control Dual In-Line Module (DIM) Information Sheet (microchip.com) |
| CPUボード(EV02G02A) | dsPIC33AK128MC106 General Purpose Dual In-Line Module (DIM) | dsPIC33AK128MC106 General Purpose Dual In-Line Module (DIM) | Microchip Technology |
| 統合開発環境 | MPLAB X IDE v6.20 | MPLAB® X IDE | Microchip Technology |
| コンパイラ | MPLAB XC DSC v3.10 | MPLAB® XC DSC Compiler | Microchip Technology |
動作説明
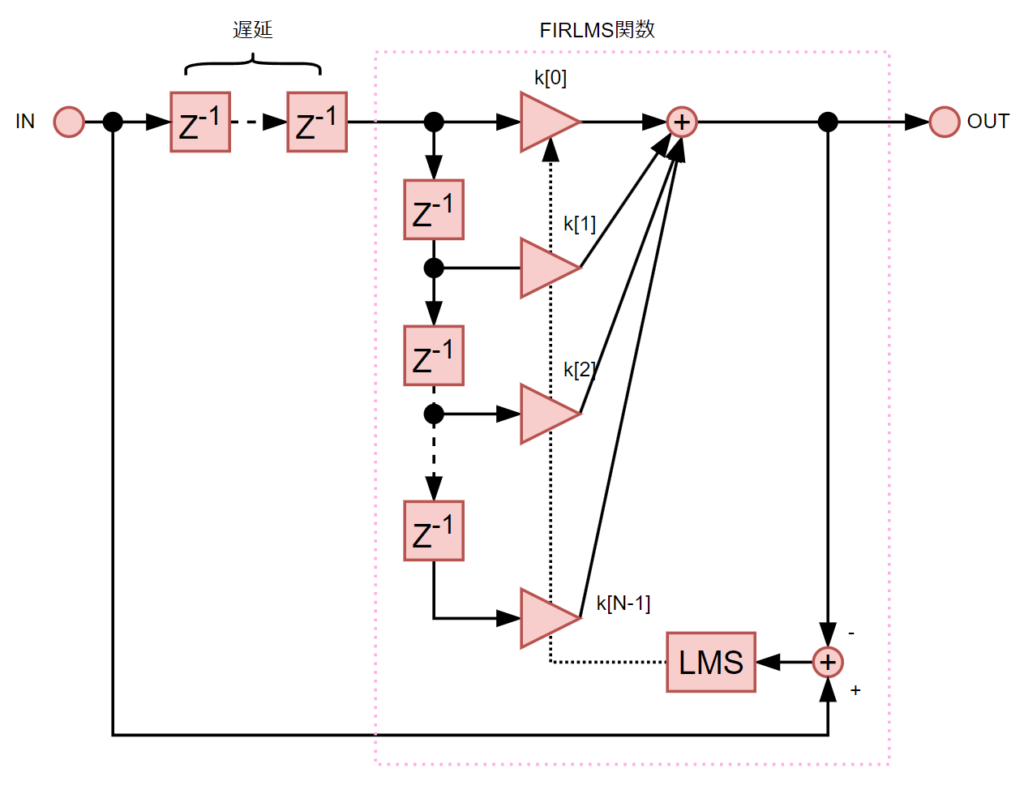
LMSアルゴリズムのブロック図
LMSアルゴリズムを用いたフィルタのブロック図を以下に示します。
FIRLMS関数は入力と出力の差分の2乗が最小になるようにをLMSアルゴリズムによって動的に導出され、FIRフィルタの係数を更新します。
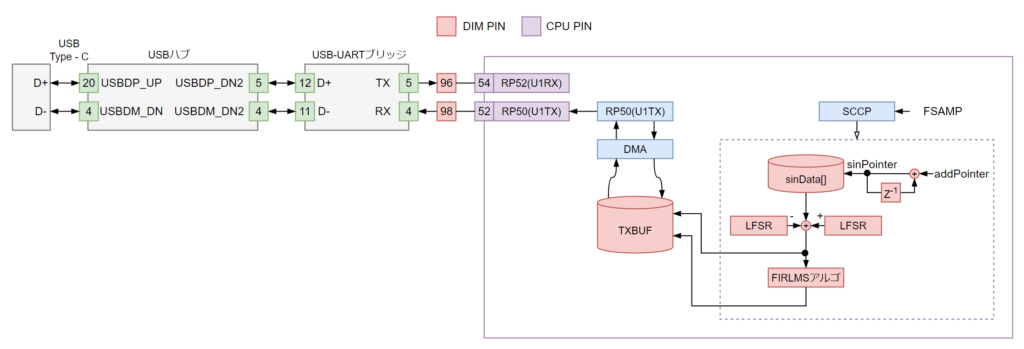
システムブロック図
ソースコードのブロック図を下記に示します。
ソースコード
インクルードファイル
コンフィグレーションファイル、クロック設定ファイルは以下のファイルをインクルードしてください。
■コンフィグレーションファイル (config.h)
■クロック設定ソースファイル(Clock_Driver.c)
■クロックヘッダーファイル(clock_driver.h)
ライブラリのインポート
DSPを使用する場合、dsp.hのインクルードとlibdsp-elf.aのインポートが必須です。

CCP割り込みの中では以下のような処理を行っています。
①乱数(ノイズ)生成
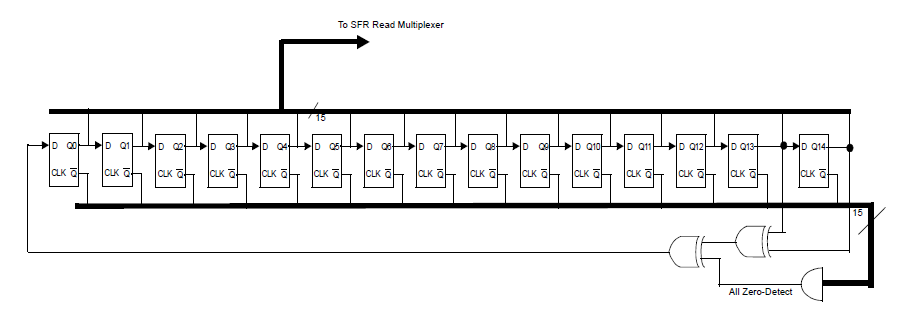
信号周波数にノイズを加えるため、LFSRの値を使用しています。LFSR(Linear Feedback Shift Register) は読み出し毎に15ビットの擬似ランダム値を生成します。もともとスイッチング電源向けなどにノイズの高調波を拡散する目的などで使用されます。15ビットのLFSR値全体は自己相関特性を持ち、擬似ランダム・ノイズの発生源として望ましくないアプリケーションもあります。
volatile int32_t RNDA = (LFSR << 14);
volatile int32_t RNDB = (LFSR << 14);②信号遅延
LMSアルゴリズムの遅延量は1サンプル以上にする必要が有ります。この遅延量は環境によって左右されますので、適宜決めるようにします。なおVectorCopy関数でディレイラインをプッシュさせることも可能ですが、数サンプルであれば直接遅延処理を行った方が処理が速いです。
fl_InDelay[5] = fl_InDelay[4];
fl_InDelay[4] = fl_InDelay[3];
fl_InDelay[3] = fl_InDelay[2];
fl_InDelay[2] = fl_InDelay[1];
fl_InDelay[1] = fl_InDelay[0];
fl_InDelay[0] = sinData[(uint16_t)sinPointer] +
(int32_t)(LFSR << 14) - (int32_t)(LFSR << 14);
srcSamps = fl_InDelay[5];
refSamps = fl_InDelay[0];③次回参照アドレスの算出と信号周波数の可変
SinRomから正弦波の瞬時値を取得する際には、sinPointerの値に基づいて参照アドレスを切り替えます。このsinPointerは、addPointerの値が加算されて更新されるため、addPointerの値を調整することで、出力される信号の周波数を制御することができます。言い換えれば、addPointerを増やせば周波数が高くなり、減らせば周波数が低くなる仕組みです。
sinPointer += addPointer;
if (sinPointer >= 1024)
{
sinPointer = 0;
Freq_side_Cnt++;
if (Freq_side_Cnt > 5)
{
Freq_side_Cnt = 0;
}
}④適応フィルタの実行
FIRLMS関数で適応フィルタの実行を行います。
係数は小さすぎると収束に時間がかかり、大きすぎると発散しやすくなります。環境によって左右されますので、適宜決めるようにします。
| 引数順序 | 項目 | 値 |
| 1 | 実行回数 | 1 |
| 2 | 出力ポインタ | &dstSamps |
| 3 | 遅延させた最後の入力データ | &srcSamps |
| 4 | FIRフィルタ構造体ポインタ | &firFilter |
| 5 | 最新の入力データ | & refSamps |
| 6 | 係数 | Q31(0.1) |
FIRLMS ( 1,&dstSamps , &srcSamps,&firFilter , & refSamps ,Q31(0.1));⑤DMA送信
入力信号と出力信号をPCに出力するため、sprintf関数でバッファに格納した後に、DMA転送を実行します
DMA0CNT = sprintf(TxBuf,"%d,%d\r\n",refSamps,dstSamps) ;
DMA0SRC = (unsigned int)& TxBuf; //転送元
DMA0CHbits.CHEN = 1U; //DMA0チャネル有効化
DMA0CHbits.CHREQ = 1U; //DMA0ソフトウェア転送開始ソースコード全体
#include <stdio.h>
#include <stdlib.h>
#include <xc.h>
#include "config.h"
#include "clock_driver.h"
#include <dsp.h>
/*----------------------------------------------------------------------------*/
/* 定数定義*/
/*----------------------------------------------------------------------------*/
#define TXBUF_SIZE 256
#define FIR_TAP 100
#define FSAMP 1000 //サンプリング周波数
#define FSIGA 12 //信号周波数A
#define FSIGB 25 //信号周波数B
/*----------------------------------------------------------------------------*/
/* グローバル変数定義*/
/*----------------------------------------------------------------------------*/
fractional fl_InDelay[8];
fractional srcSamps;
fractional dstSamps;
fractional refSamps;
fractional sinData[1024];
float sinPointer;
float addPointer;
int Freq_side_Cnt;
int8_t TxBuf[TXBUF_SIZE];
fractional firDelay[FIR_TAP] __attribute__ ((space(ymemory), near));
fractional firCoeff[FIR_TAP] __attribute__ ((space(xmemory), near));
FIRStruct firFilter;
/*----------------------------------------------------------------------------*/
/**
* @fn main(int argc, char** argv)
* @brief PROJECT_4_1_4_DSP_FIRLMS
* @param[in] argc argument count
* @param[in] argv argument vector
* @retval EXIT_SUCCESS 成功
* @retval EXIT_FAILURE 失敗
* @detail DSPによるFFT
* @note
*/
/*----------------------------------------------------------------------------*/
int main(int argc, char** argv)
{
/*------------------------------------------------------------------------*/
/* クロック初期化*/
/*------------------------------------------------------------------------*/
vdg_Clock_Set_Register(); /* クロック初期化 */
/*-----------------------------------------------------------------------*/
/* ピン設定*/
/*-----------------------------------------------------------------------*/
RPOR12bits.RP50R = 9u; //UART1出力 RP50
RPINR9bits.U1RXR = 52u; //UART1入力 RP52
/*-----------------------------------------------------------------------*/
/* UART初期化*/
/*-----------------------------------------------------------------------*/
U1CON = 0x00000000u;
U1STAT = 0x00000000u;
U1BRG = (uint32_t) (100000000 / 460800);
U1RXB = 0x00000000u;
U1TXB = 0x00000000u;
U1PA = 0x00000000u;
U1PB = 0x00000000u;
U1CHK = 0x00000000u;
U1SCCON = 0x00000000u;
U1UIR = 0x00000000u;
U1CONbits.CLKMOD = 1u;
U1CONbits.RXEN = 1u; //受信許可
U1CONbits.TXEN = 1u; //送信許可
U1CONbits.ON = 1u;
INTCON4bits.OVATE = 0;
for (int u2l_Loop = 0;u2l_Loop < 1024 ;u2l_Loop ++)
{
sinData[u2l_Loop ] = Q31(sin((float)u2l_Loop /1024 * 2 * PI)) >> 2;
}
/*-----------------------------------------------------------------------*/
/* DMA設定 */
/*-----------------------------------------------------------------------*/
DMACONbits.ON = 1U; //DMA有効
DMACONbits.PRIORITY = 0U; //Fixed
DMACONbits.SIDL = 0UL;
DMABUF = 0x00000000u;
DMALOW = 0x4000U;
DMAHIGH = 0x7FFFU;
DMA0CH = 0x00000000U;
DMA0CHbits.SIZE = 0U; //8Bit
DMA0CHbits.TRMODE = 0U; //ワンショット
DMA0CHbits.DAMODE = 0U; //
DMA0CHbits.SAMODE = 1U; //Increment
DMA0SEL = 0x10U;
DMA0STAT = 0x00000000U;
DMA0SRC = (unsigned int)& TxBuf; //転送元
DMA0DST = (unsigned int)& U1TXB; //転送先
DMA0CNT = 8u; //転送回数
DMA0CLR = 0x00000000U;
DMA0SET = 0x00000000U;
DMA0INV = 0x00000000U;
DMA0MSK = 0x00000000U;
DMA0PAT = 0x00000000U;
/*------------------------------------------------------------------------*/
/* Filter初期化 */
/*------------------------------------------------------------------------*/
FIRStructInit( &firFilter, // フィルター構造体
FIR_TAP, // フィルター係数タップ数
firCoeff, // フィルタ係数ポインタ
0, // フィルタ係数PSVページ
firDelay); // ディレイバッファ
FIRDelayInit( &firFilter );
for(int i = 0; i < 100; i++) {firCoeff[i] = 0;}
addPointer = 1024/(FSAMP / FSIGA);
/*-----------------------------------------------------------------------*/
/* SCCP1設定 */
/*-----------------------------------------------------------------------*/
CCP1CON1 = 0x00000000u;
CCP1CON1bits.T32 = 1u;
CCP1CON2 = 0x00000000u;
CCP1CON3 = 0x00000000u;
CCP1PR = 100000000 / FSAMP;
IPC6bits.CCT1IP = 5;
IFS1bits.CCT1IF = 0;
IEC1bits.CCT1IE = 1u;
CCP1CON1bits.ON = 1u;
INTCON1bits.GIE = 1;
/*------------------------------------------------------------------------*/
/* メインルーチン */
/*------------------------------------------------------------------------*/
while (1)
{
if (Freq_side_Cnt < 3)
{
addPointer = 1024/(FSAMP / FSIGA);
}
else
{
addPointer = 1024/(FSAMP / FSIGB);
}
}
return EXIT_SUCCESS;
}
void __attribute__((interrupt, no_auto_psv)) _CCT1Interrupt(void)
{
/*------------------------------------------------------------------------*/
/* ①乱数生成 */
/*------------------------------------------------------------------------*/
volatile int32_t RNDA = (LFSR << 14);
volatile int32_t RNDB = (LFSR << 14);
/*------------------------------------------------------------------------*/
/* ②信号の遅延 */
/*------------------------------------------------------------------------*/
fl_InDelay[5] = fl_InDelay[4];
fl_InDelay[4] = fl_InDelay[3];
fl_InDelay[3] = fl_InDelay[2];
fl_InDelay[2] = fl_InDelay[1];
fl_InDelay[1] = fl_InDelay[0];
fl_InDelay[0] = sinData[(uint16_t)sinPointer] +
(int32_t)(LFSR << 14) - (int32_t)(LFSR << 14);
srcSamps = fl_InDelay[5];
refSamps = fl_InDelay[0];
/*------------------------------------------------------------------------*/
/* ③次回参照アドレスの算出と信号周波数の可変 */
/*------------------------------------------------------------------------*/
sinPointer += addPointer;
if (sinPointer >= 1024)
{
sinPointer = 0;
Freq_side_Cnt++;
if (Freq_side_Cnt > 5)
{
Freq_side_Cnt = 0;
}
}
/*------------------------------------------------------------------------*/
/* ④適応フィルタの実行 */
/*------------------------------------------------------------------------*/
FIRLMS ( 1,&dstSamps , &srcSamps,&firFilter , & refSamps ,Q31(0.1));
/*------------------------------------------------------------------------*/
/* ⑤DMA送信 */
/*------------------------------------------------------------------------*/
DMA0CNT = sprintf(TxBuf,"%d,%d\r\n",refSamps,dstSamps) ;
DMA0SRC = (unsigned int)& TxBuf; //転送元
DMA0CHbits.CHEN = 1U; //DMA0チャネル有効化
DMA0CHbits.CHREQ = 1U; //DMA0ソフトウェア転送開始
IFS1bits.CCT1IF = 0;
}
結果1
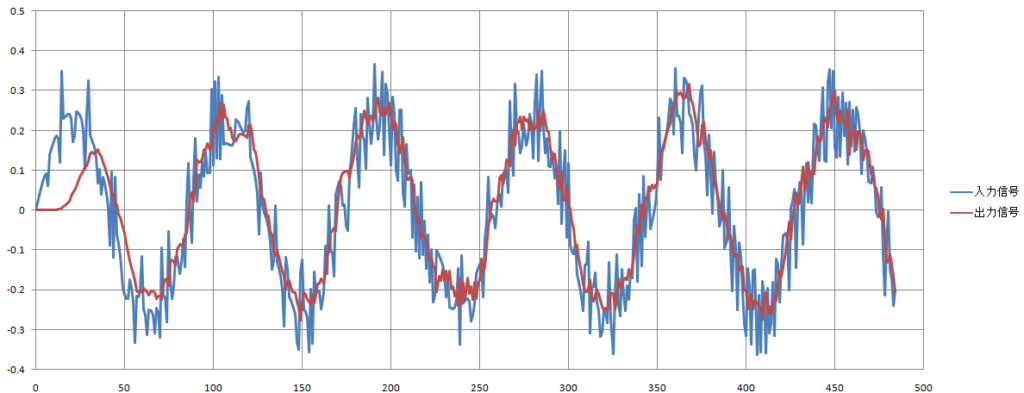
サンプリング周波数等を以下の値に設定した時の入力信号と出力信号を下記に示します。
| 項目 | 設定値 |
| サンプリング周波数(Hz) | 1000 |
| 遅延量 | 5 |
| 信号周波数A(Hz) | 12 |
■係数 = Q31(0.1)
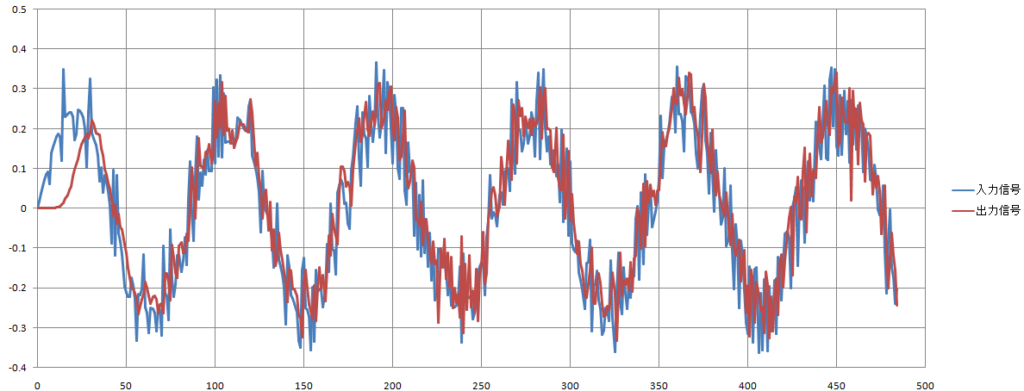
■係数 = Q31(0.25)
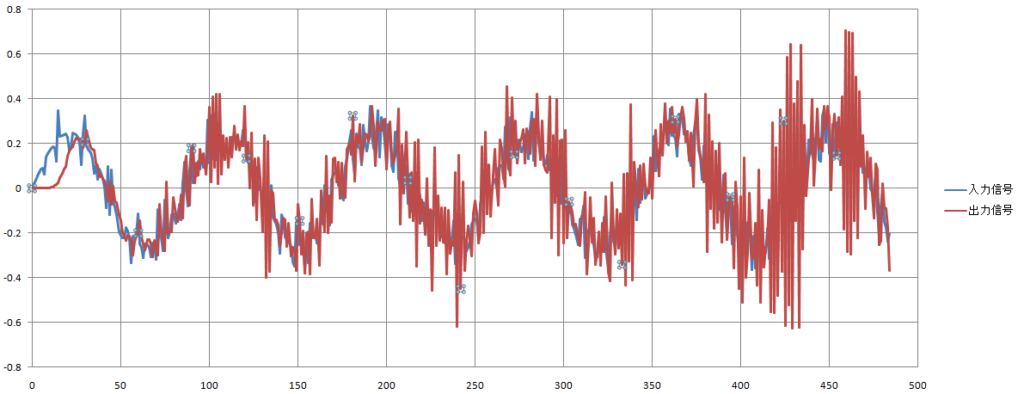
■係数 = Q31(0.5)
結果2
サンプリング周波数等を以下の値に設定した時の入力信号と出力信号を下記に示します。
| 項目 | 設定値 |
| サンプリング周波数(Hz) | 1000 |
| 遅延量 | 5 |
| 信号周波数A(Hz) | 12 |
| 信号周波数B(Hz) | 25 |
| 係数 | Q(0.1) |

記事についての注意点
本記事は慎重に内容を検討し正確さに努めておりますが、内容に誤りがあったとしても、この記事を参考にして生じた損害等については一切の責任を負いません。

コメント